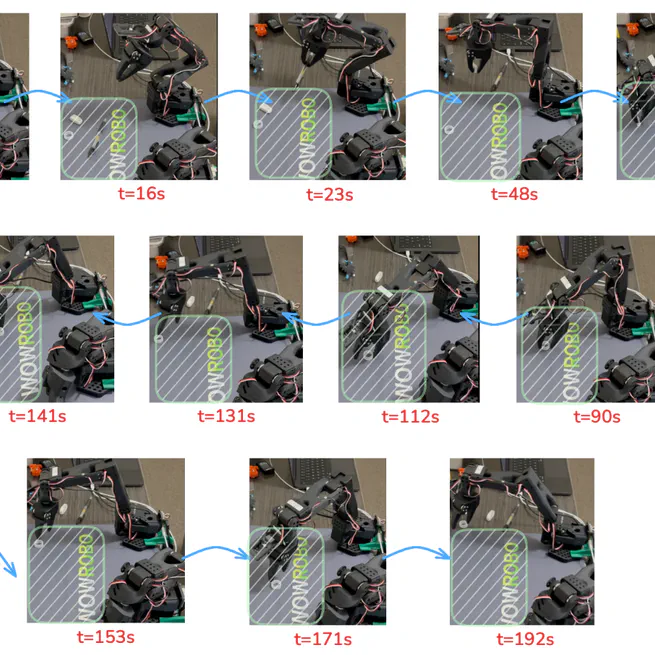
(Ongoing work) Investigating failure modes in VLA models fine-tuned with RL using interpretability techniques for robotic manipulation tasks.
May 13, 2025