Safe RL for Autonomous Drone Racing
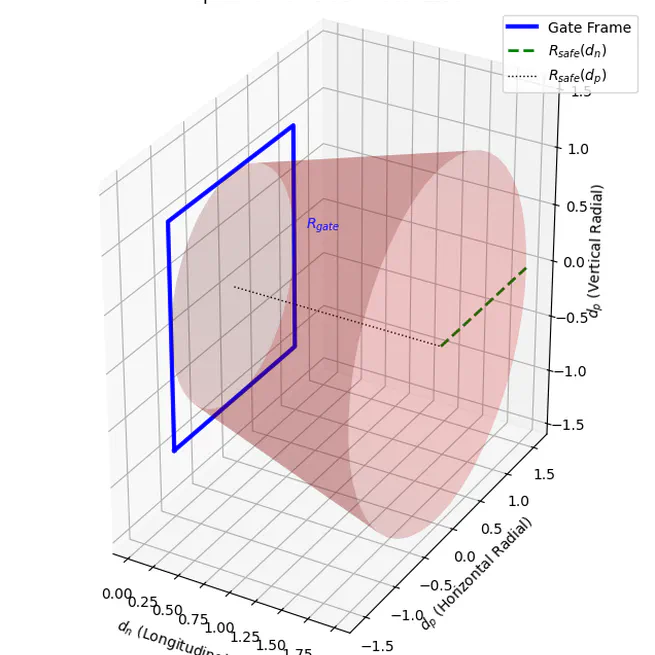
Developed an end-to-end time-optimal RL framework for autonomous drone racing using PPO with CBF–based reward shaping for collision-free gate traversal while enabling aggressive racing lines via dynamic safety funnel constraints. Achieved ~38% reduction in lap time and ~34% improvement in target-region accuracy compared to the baseline.
Dec 12, 2025