Working towards developing the drone research ecosystem at Illinois. Led the offical aerial robotics team at the A2RL Drone racing compeition at Abu Dhabi. Qualified till the quarter finals in our debut season.
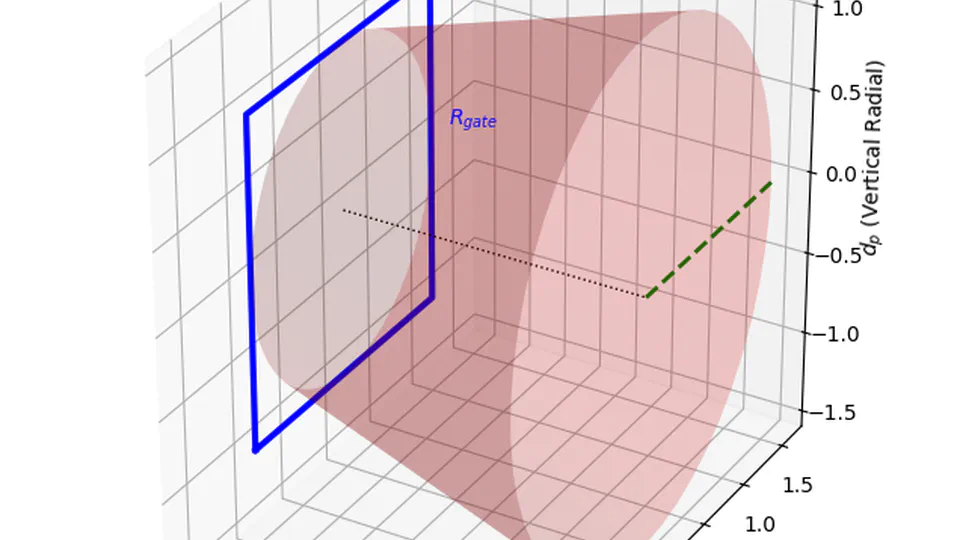
Developed an end-to-end time-optimal RL framework for autonomous drone racing using PPO with CBF–based reward shaping for collision-free gate traversal while enabling aggressive racing lines via dynamic safety funnel constraints. Achieved ~38% reduction in lap time and ~34% improvement in target-region accuracy compared to the baseline.
LiDAR-based SLAM and PID wall-tracking for autonomous exploration on an F1-Tenth vehicle. Integrated real-time object detection with map-based location reporting for precise object localization.
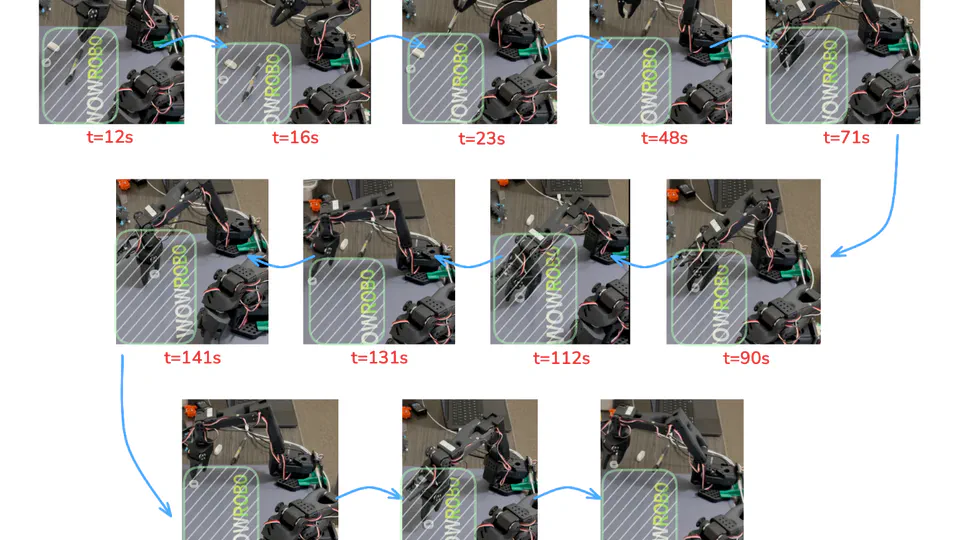
(Ongoing work) Investigating failure modes in VLA models fine-tuned with RL using interpretability techniques for robotic manipulation tasks.
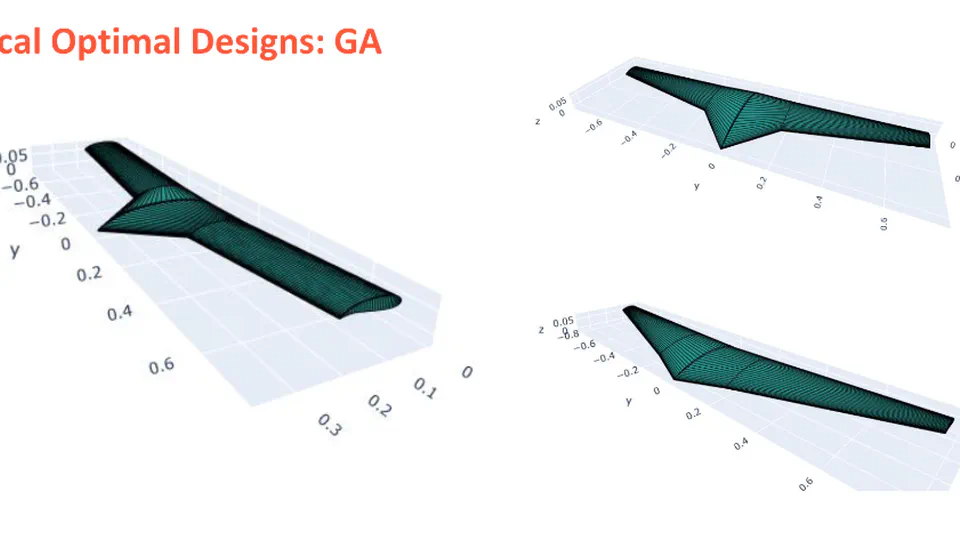
Designed an end-to-end wing optimization pipeline by coupling GAs with VLM simulations for micro-UAVs. Automated aerodynamic sizing and performance evaluation under multiple flight constraints.
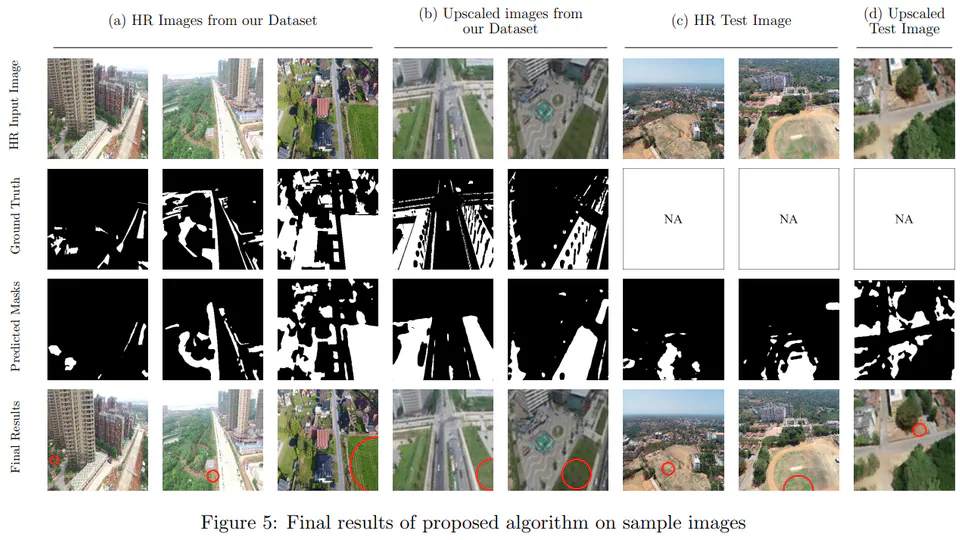
Novel approach for safe landing zone detection for UAVs, leveraging DL-based image segmentation with a custom dataset and integrating SuperResolution, resulting in up to 6.3% improvement in accuracy over SOTA methods.
Custom Hexacopter featuring a custom-made Li-ion battery pack for high-endurance and heavy payload capabilities.
Custom micro-UAV platform with integrated FPV for long-range outdoor exploration.
Achieved 1st place in Design at the SAE AeroDesign East 2023 along with the fastest lap performance. Patent-pending BWB design with F/W, optimized for transporting high-volume payloads.
Winning design for the SAE India Aerothon Competition. Fully indigenous drone optimized for target detection and precise payload deployment.